RISC-V: A Baremetal Introduction using C++. Interrupt Handling.
This post is a draft for Medium.
This is the seventh post in a series. This post is about RISC-V interrupt handling in C++.
What are the basics of interrupt handing in RISC-V? Can we utilize modern C++ to simplify the interrupt handling?
RISC-V Machine Mode Interrupts
The RISC-V ISA is not specialized for embedded applications (when compared to an ISA such as the ARM Cortex-M). Keeping this in mind, the core ISA interrupt handing is limited — an interrupt controller is not in the core ISA specification.
What do we have in the base ISA? A timer, an external interrupt and a
software interrupt (mti, mei, msi). These are defined in machine
level ISA standard machine mode interrupt
registers.
For the example used in these posts we just need the timer interrupt, mti, which is included in the core ISA.

For a simple embedded application platform-specific machine-level
interrupt sources can extend the mip and mie registers to gain
more interrupts without an external interrupt controller. This allows for 16 additional inputs for a 32-bit base ISA.
However, it is expected most cores would be integrated with an
external interrupt controller. The SiFive target device uses the PLIC
(Platform Local Interrupt
Controller)
which connects to the mei external interrupt.
C++ Callbacks
An interrupt is an asynchronous event. What do we do in C++ when an asynchronous event occurs?
In modern C++ it is common to associate a lambda function with an event and execute the function when the event occurs. There are several advantages of lambda functions. The advantages I consider important are code locality, and the ability to store state easily.
Can we register a C++ lambda function as an interrupt handier?
In Part1 we saw a lambda function declared such as this:
static const auto handler = [&] (void)
{
auto this_cause = riscv::csrs.mcause.read();
// ...more code...
}
This is a bit of syntactic sugar. The compiler will define an object to capture the caller’s context and a callback method to execute the lambda function body.
So can we take a pointer to this callback method and save it as an interrupt vector? No, for a few reasons:
- A RISC-V interrupt handler must have a specific prologue to save context to the stack, and epilogue to restore the stack and return via
mret, unlike ARM Cortex-M, but like most ISAs, interrupts are not standard C functions. - A RISC-V interrupt handler has alignment requirements.
- The C++ callback from the lambda function needs to be called as a method of a C++ object.
Installing an Interrupt Handler with GCC
We need to use some GCC compiler extensions when declaring functions used as interrupt handlers. These use attributes and pragmas to achieve the first two requirements above.
namespace irq {
static void entry(void) __attribute__ ((interrupt ("machine")));
#pragma GCC push_options
// Force the alignment for mtvec.BASE.
#pragma GCC optimize ("align-functions=4")
static void entry(void) {
// Jump into the function defined within the irq::handler class.
handler::handler_entry();
}
#pragma GCC pop_options
}
That is not pretty, but we now have a function address we can load to
the interrupt vector register. On RISC-V that’s a machine mode
register
mtvec.
riscv::csrs.mtvec.write(reinterpret_cast<std::uintptr_t>(irq::entry) );
Trampoline into C++
But how does this reach our lambda function? There is some need for C++ tricks and an optional RISC-V trick. We need to extract the function object context of the lambda function, we need to store it somewhere for the raw interrupt handler to use, and we need to call the lambda as a method of that object.
- To store context for an the IRQ handler, we can use
another machine mode register
mscratch, although a global variable could also have been used. - To extract the lambda function object context, a
templated function is used to access the generated lambda functor
type. It’s important not to use
std::functionhere, asstd::functionmakes use of the heap.
The flow is:
- Create a static function
irq::handler_entry()that calls an inlined static member_execute_handler. - Assign
_execute_handlerto an intermediatevoid(*)(void)lambda function declared in theirq::handlerconstructor. - Save a pointer to the handler’s functor object in
the
mscratchregister. - The intermediate
_execute_handlerlambda reads back the functor object pointer frommscratchand callsoperator()on the pointer to the lambda functor object. - The lambda function is invoked.
namespace irq {
class handler {
public:
/** Create an IRQ handler class to install a
function as the machine mode irq handler */
template<class T> handler(T const &isr_handler);
inline static void (*_execute_handler)(void);
// Trampoline function is required to bridge from the entry point
// function declared with specific attributes and alignments to this class member.
friend void entry(void);
/* Step 1 */
static inline void handler_entry(void) {
_execute_handler();
}
}
template<class T> handler::handler(T const &isr_handler) {
// This will call the C++ function object method that represents the lambda function above.
// This is required to provide the context of the function call that is captured by the lambda.
// A RISC-V optimization uses the MSCRATCH register to hold the function object context pointer.
/* Step 2 */
_execute_handler = [](void)
{
// Read the context from the interrupt scratch register.
/* Step 4 */
uintptr_t isr_context = riscv::csrs.mscratch.read();
// Call into the lambda function.
/* Step 5 */
return ((T *)isr_context)->operator()();
};
// Get a pointer to the IRQ context and save in the interrupt scratch register.
uintptr_t isr_context = (uintptr_t)&isr_handler;
/* Step 3 */
riscv::csrs.mscratch.write( reinterpret_cast<std::uintptr_t>(isr_context) );
// Write the entry() function to the mtvec register to install our IRQ handler.
riscv::csrs.mtvec.write( reinterpret_cast<std::uintptr_t>(entry) );
}
}
After doing all that we hope the optimizer has reduced this to a simple trampoline function.
Conclusion
Could we implement this in pure C++? No, but it’s close.
Does C++ add value here? It’s questionable.
- For the caller, we’ve now reduced an interrupt handler to a standard C++ event driven programming model. This will allow the global state to be removed and possibly extended to other programming models such as promise/future.
- But for the implementation, a traditional C callback would be much simpler to implement and understand. The C++ code to insert the handler is obfuscated and offers no abstraction.
This is the last technical post of the series, the next post is a conclusion.
The Disassembly
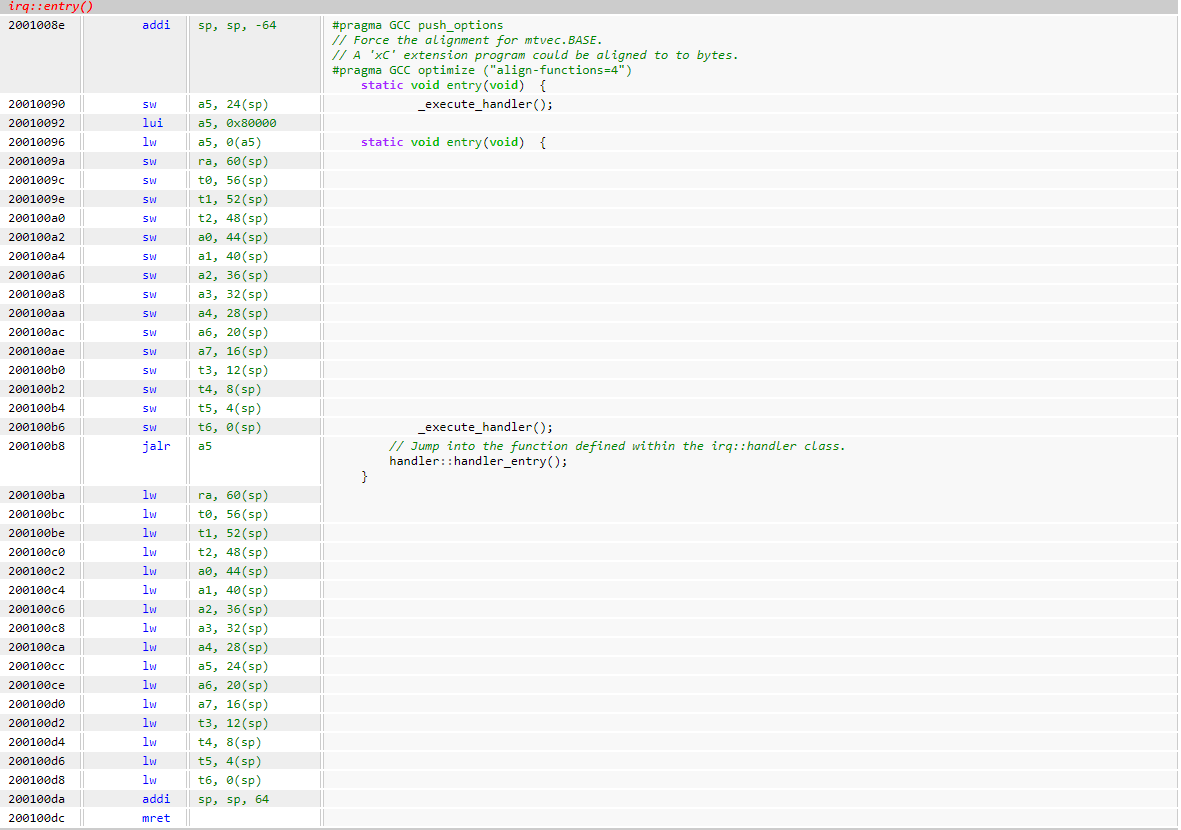
What happens when we compile the above? The interrupt service routine is below.
- It loads the
_execute_handlerfunction address from0x8000_0000intoa5. - Saves the register context on the stack.
- Calls
_execute_handlerby jumping (jalr) to the address ina5. - Restores the context from the stack.
- Executes
mretto exit the interrupt.
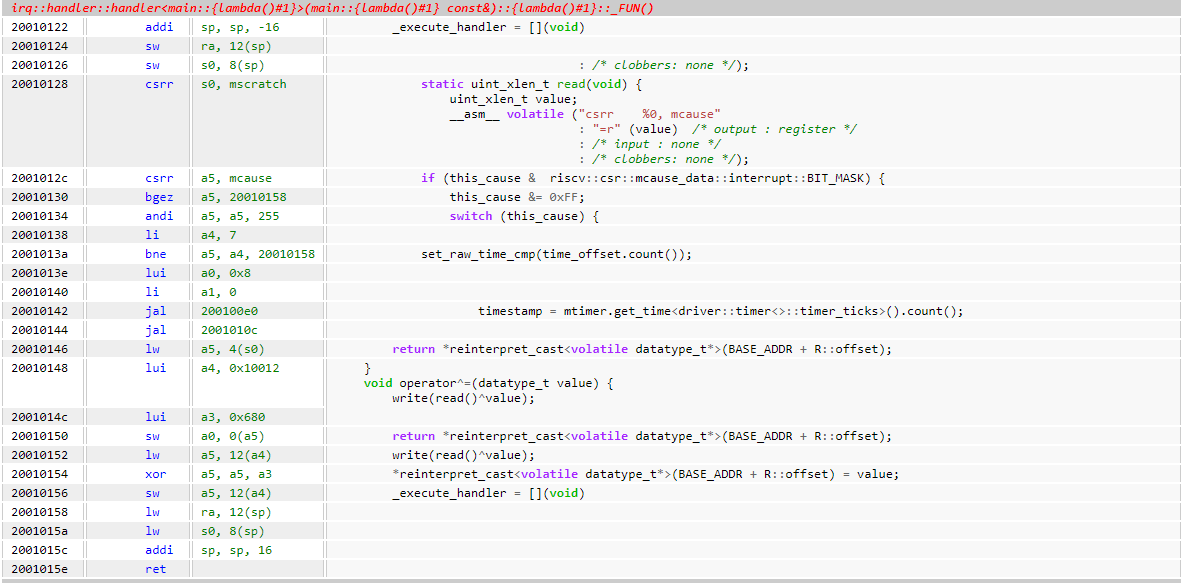
The _execute_handlerlambda function is below.
- The context can be seen to be read from
mscratchat0x2001_0128. - It’s clear that the
handlerlambda function has been inlined from when0x2001_012creads themcauseregister.